

AIやロボットを活用した物流ソリューションを提供するGROUND株式会社は、2025年6月3日、同社が開発・提供している物流施設統合管理・最適化システム「GWES(ジーダブリューイーエス)」の新モジュールとして、リアルタイムで作業者の最適配置を支援する「Resource Allocator(リソース アロケーター、RA)」の提供を開始すると発表した。

「リソース アロケーター」は、物流施設内の作業量や作業者のスキル・シフト情報、進捗状況など複数の要素・制約条件を基に、数理最適化と時系列予測を活用して数万通りの要員配置パターンをリアルタイムに再計算し、現場管理者へ個別具体的な移動指示を提示するツール。従来は属人的な判断に依存していた要員の再配置を、データに基づいて自動化。判断の迅速化と精度の向上を支援するとされている。
GROUND株式会社は今から10年前、2015年に次世代型物流施設の実現を目指して創業した物流スタートアップ。以前は棚搬送ロボット「Butler」や、ピックアップ支援AMR「PEER」などを展開していた。いまでもロボットも展開しているが、「近年は軸足をロボットからソフトウェアに移している」という。GROUND CEOの宮田啓友氏にオンラインで話を伺った。
■物流の「全体最適」と「オープン」を目指すGROUND

GROUNDは以前から、「全体最適」と「オープン」を掲げていた。「オープンなエコシステム」を構築することで大手に対抗しようというわけだ。そのためのファーストステップが「物流の装置産業化」だと考えて、まずはロボット普及に力を入れた。従来型のマテハン機器だけでない新たな機器を導入することで物流のDX化を進めていったわけだが、当時は「海外製の安価なロボットなど物流倉庫で使われるわけがない」と言われていたと宮田氏は振り返る。
*動画
2025年現在、物流倉庫でのロボット活用は、まだまだ「当たり前」とまではいかないが、だいぶ進んだ。活用されているのは安価で性能が高いロボットで、海外製の機材も多い。新型コロナ禍を経て、物流需要の変動を吸収するためにも、さらにロボット化は進行中だ。
*動画
いっぽう、物流ソリューションの進化自体も速く、必要に応じて現場に導入できるようRaaS化、従量課金型も進んだ。ロボットは初期投資費用が高い。数億円かけて購入後に徐々に減価償却していくのではなく、必要なときにパッとシステムを構築して、需要に合わせて規模を変える、場合によっては新たな製品へと置き換えて使おうという提案である。
RaaS型のロボット提供には大手総合商社も参入し、資金力勝負の戦いが続いている。ロボットやマテハン機器が投資型から従量課金型へと変わるなか、GROUNDは、「リソース全体の最適化」ソリューションに注力する方向に舵を切った。2020年9月から提供開始していた物流ソフトウェア「DyAS」は、翌2021年8月から「GWES」へと統合して提供している。
*動画
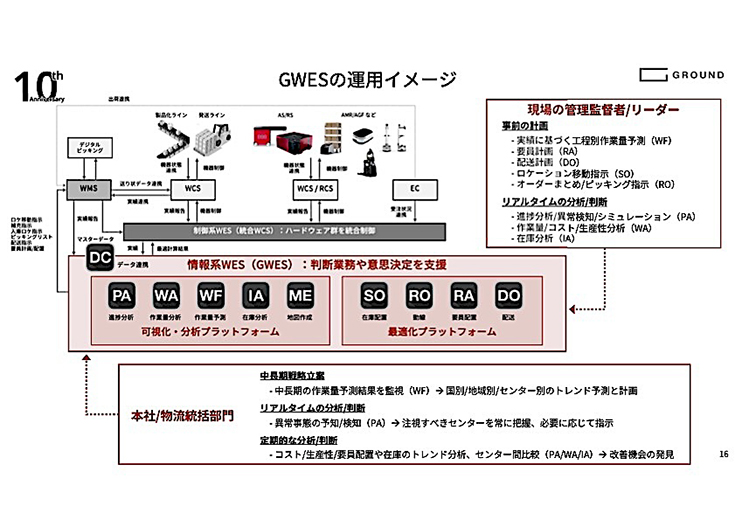
「GWES」は、倉庫実行システム(WES、物流施設運用管理システムともいう)の一種で、複数のモジュールから構成されている。特にマテハン機器の統合制御ではなく、判断や意思決定を支援する情報系の管理に注力している。拠点間の在庫最適化、人も含めたリソースの最適化、物流施設の管理者が行っている業務領域をソフトウェアで最適化することを目指して開発を続けている。なおGWESとは「GROUND Warehouse Execution System」の略。
「この10年、基本的な方針は当時から変えずに、プラットフォーム創造に向けてものづくりをしている」と宮田氏は語った。
■可視化と分析、そして最適化を行う倉庫管理システム「GWES」

GWESは三菱倉庫、日本通運、花王などで活用されている。花王では44拠点で活用されていると2025年2月にリリースされている(https://www.groundinc.co.jp/newsroom/pressrelease/20250227)。

今回の「リソース アロケーター」モジュールの提供開始も「GWES」の継続開発の一環だ。宮田氏は「GWES」について「物流倉庫を制御するOS」だと語った。「ECのような厳しい環境のなかでとどこおりなく物流環境を維持するにはソフトウェアの力は不可欠だ」という。クラウドを使った製品の機能向上は多くのプロダクトで当たり前になっているが、GWESも同様のコンセプトで開発されており、物流施設全体を滞りなく運用するだけでなく、機能を随時向上させている。

物流施設の業務進捗の可視化や分析が可能なGWESだが、最大の特徴は翌日以降の作業量をシミュレーションすることができること。上位システムであるWMS(倉庫管理システム)と接続することでトランザクションを解析して作業量を予測する。「アルゴリズムから自社開発しており、数理最適化や時系列予測技術を活用している」という。

「GWES」はレイヤー構造となっており、必要に応じてモジュールを選んで機能を選択する。ユーザーにとって重要なのはアプリケーション層で、物流センターでこれからどれだけの出荷があるかを予測する。これをもとにあるべき在庫の配置を割り出すこともできる。
物流倉庫ではWMSからホワイトボードに転記して計画管理するといったアナログなやり方もまだ行われているが、デジタル化されることで物流センターだけではなく、本社でも同様の管理ができるようになる。

今後は「見える化」からさらに最適化へと踏み込んでいく。数理最適化を使って倉庫のどこに入れるのが無駄がないのか、在庫の配置も最適化を狙う。

出荷量予測をすることでロケーション変更の最適化も行えるという。オーダー処理に対してどういう順番でピッキング処理をするのが最適化なのか組み替えるモジュールもある。出荷する箱の具体的な量や方面を計算し、どの業者のどの便に載せるのが最適なのかを計算するモジュールもあるという。

■人員配置の最適化ツールは引き合いが強い

そして新たにリリースされたモジュールが、今回発表された「Resource Allocator(リソース アロケーター、RA)」だ。いまは人間の管理者が「カンと経験」のみで決めている人員の配置を自動で最適化するツールだ。「もっとも現場からの引き合いが強い」という。
倉庫の作業は、大雑把にいうと、入荷工程、在庫に棚入れする工程、オーダーに応じてピッキングする工程、そして出荷のためパッキングする工程の4つに大別される。それぞれに自動化機器があるものの、まだまだ人手に依存する作業も多く、人が配員されて作業を行っている。

現在は、各工程リーダーが時事刻々と変わる状況に合わせて進捗状況を管理して、場合によってはトランシーバーなどでやり取りして応援を派遣し合うことで融通している。それに対して、ソフトウェアで指示を出すものだ。

管理者が判断している業務を自動化するGWESによって「ほぼ人の判断が必要なく出庫環境が整う。リソースをダイナミックに再配置できる製品は他にない」と宮田氏は語る。
■必要性が増大するリソース配分最適化ツール

業務が複雑化する一方で、人手不足が進行し、ロボットを含む自動化機器が普及しつつある人的・物的リソースの配分を最適化する管理ツールの役割と必要性はどんどん増している。ただ、物流倉庫に限らない話だが、ロボットが作業する必要があるフィジカルな環境は現場ごとに異なる。そして、細部の多様さが、しばしば自動化の大きな壁となっているのが現場事情である。
個別に事情が異なる現場の最適化をどう実現するか。全体最適を掲げるGROUNDの今後の取り組みにも期待している。
GROUND株式会社
日本通運の「誰にもやさしい倉庫」プロジェクト、自律型協働ロボットAMRを採用 歩行困難者も施設内作業を行える環境の実現へ
オカムラとGROUNDが資本業務提携を強化 AIソフトウエアを活用した自動化や省人化により、企業の物流改革を推進
GROUND、可搬重量を2倍以上に高めた自律型協働ロボット「PEER100」提供開始 独自開発のソフトウェア機能も同時提供
GROUND関連記事
ロボットの見方 森山和道コラム



この記事を読んだ人におすすめ









ABOUT THE AUTHOR /
森山 和道PR




このカテゴリの新着記事





注目のロボット









注目のロボット企業







連載・コラム

